Spherical robots
Spherical robots, sometimes regarded as polar robots, are stationary robot arms with spherical or near-spherical work envelopes that can be positioned in a polar coordinate system. Sounds pretty smart – you are free to use this if you want to impress someone with your wit.
So, these robots are more sophisticated than Cartesian and cylindrical robots, while control solutions are less complicated than those of articulated robot arms. This may be the reason why sometimes they are used as a base for robot kinematics exercises.
Also, it should be noted that spherical robot type takes a significant spot in robot history, as some of the first robot arms can be counted into this type. Modern industrial robot arms kind of evolved from spherical robots and are sometimes regarded as this type, as their work envelope often is sphere-like as well.
The structure
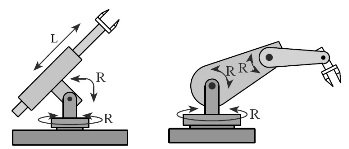
The spherical robots’ structure is the one you can see at the left side of this picture. As you can see, it has two rotary joints and one linear. Thus a spherical work envelope is formed. Of course, it is not a sphere, but reachable places can still be calculated in a polar coordinate system.
As you can understand, there can be more than three joints. However, these three are the basic ones that form the work envelope. Further joints would add more flexibility, but wouldn’t radically change the reachable area. For example, if the gripper could rotate, this would be a 4-axis robot while the work envelope wouldn’t change at all.
A robot with an R-R-R structure with three rotary joints can be seen at the right side of the above picture. As you understand, robots of this kind have a near-spherical work envelope. Most modern industrial robots are derivatives of this type.
Historical spherical robots
As I mentioned earlier, stationary spherical robots have created industrial robots’ history. In my opinion, it’s so because robots of this type were simple enough to create control systems with available hardware at the time, yet enough flexible for real world applications.
The Stanford arm
The Stanford arm was designed in 1969 by Victor Scheinman who at the time was a student working at the Stanford Artificial Intelligence Lab – SAIL. The arm has five rotary joints and one linear joint. The mechanical structure is the same I discussed above plus three rotary joints.
The arm is all-electric, it had DC motors with potentiometers for position feedback and analog tachometers for velocity feedback. Also, it can be regarded as one of the first robots designed specifically for computer control.
It seems needless to say as you probably understand it already – the Stanford arm is significant as it helped to form the knowledge base about robot control we use today.
Unimate
Unimate is another historical spherical manipulator. It is widely regarded as the first industrial robot. In 1961 first Unimate began its work at General Motors. At the beginning, it was used for die casting and spot welding as these applications proved to be financially beneficial.
This success spawned the industrial robot industry as we know it today. It featured hydraulic drive and could execute commands stored on a magnetic drum. Unimate, cherished by George Devol and Joe Engelberger, was manufactured by the first industrial robot company – Unimation.
Another interesting twist of fate took place in 1977. In that year Unimation acquired Victor Scheinman’s company – Vicarm. Using this new knowledge that originated from the Stanford arm project they designed Unimate PUMA. In 1989 Unimation was acquired by Stäubli.
As you see this type of robot arms is quite important because of its place in history.However, nowadays you won’t see many of them actually being used, as articulated (anthropomorphic) robot arms are more flexible, and the software and hardware development allows us to use them with remarkable results.